 日本語
日本語








Overview
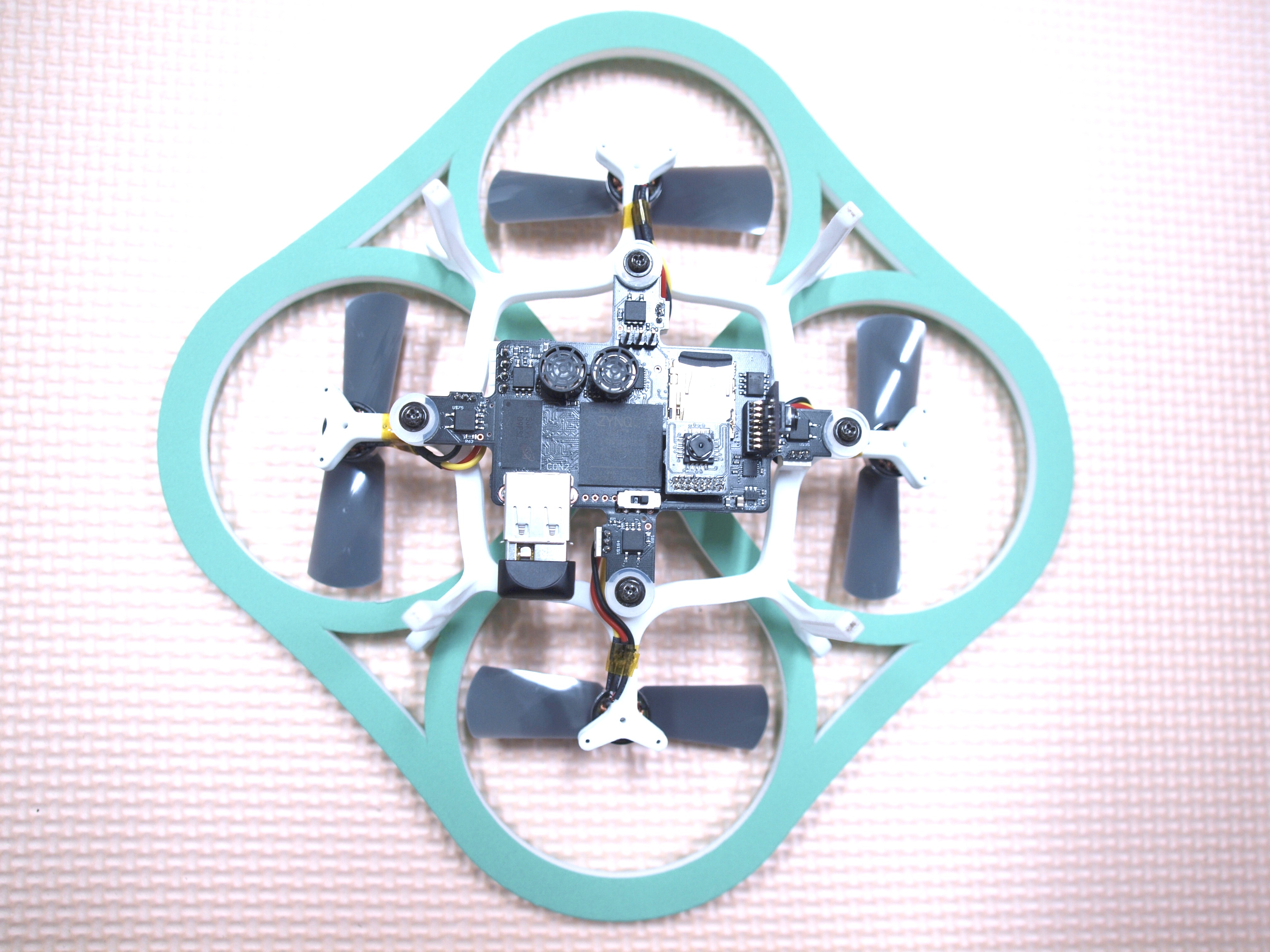
Phenox 2 is a very compact quadcopter robot, but it implements full sensors and computers required for multi-purpose autonomous mobile robots. On-board FPGA conducts fast image processing, which enables Phenox2 to control self-position, and to conduct visual SLAM(Simultaneous Localization and Mapping) in a real time.
Phenox2 can fly very quietly with our designed propellers, and its body is redesigned to be safer and stronger. So it’s also suitable not only for research, but also educational materials.
The main difference from Phenox is that Phenox 2 has a WiFi module. Users can install packages to on-board Linux operating system.
WiFi modules also enable users to operate Phenox 2 as a “Flying Web Server” by customizing and building C, C++ program using both Phenox APIs and open source library such as OpenCV and Node.js.
No external SDK is required, because all building materials are already installed to Linux Phenox 2 itself!
Specification
Total Weight: 75 grams (including battery)
Additional Paload: 20 grams
Endurance: 5 minutes in flight, 20 minutes on the ground.
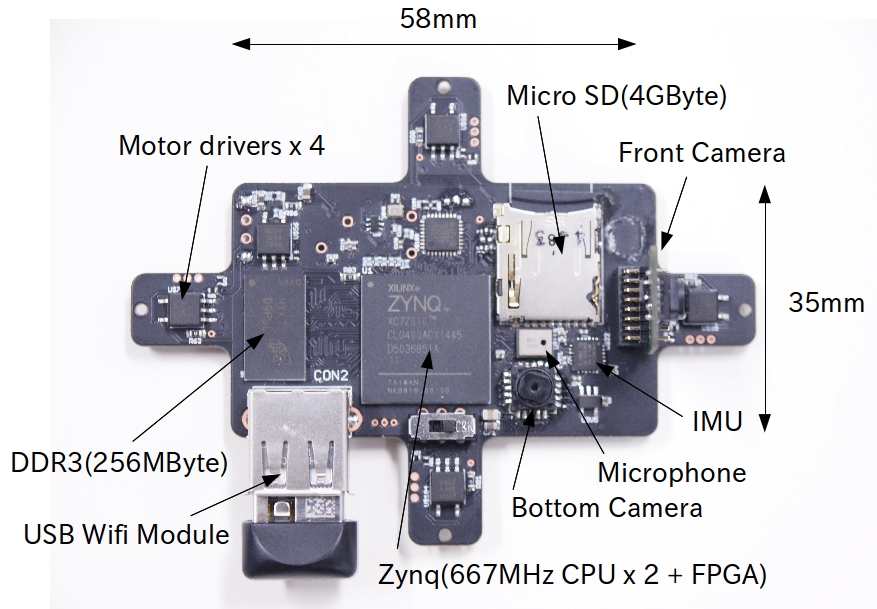
Computer: Xilinx Zynq XC7Z010(Cortex-A9 processer 667MHz x 2, FPGA)
Memory: DDR3 memory(256MB), microSD card(4GB)
Sensors: CMOS camera x 2, a microphone, IMU(9-DOF), a sonar sensor
Communication: 2.4GHz WiFi module

Languages of on-board SDK: C or C++
Form of softwares:
(Technical manuals and software libraries of Linux system are now updating.)
Movie
Phenox2 sample application using programmable platform.
Phenox PV