 日本語
日本語








FEATURES
Intelligent - Phenox requires no external control to fly.
Interactive - Phenox has two cameras and one microphone to recognize you.
Programmable – Linux-based system of Phenox is programmable. You can write your own program and realize your creative ideas in the sky.
APPLICATIONS
Above Your Hand
Call to Fly
IMPLEMENTATION
Zynq-7000 Soc (dual core CPUs and FPGA)
DDR3 (256MB)
micro SD (4GB)
Four Brushless Motors
Two cameras, Microphone, IMUs and Range Sensor
SPECS
Length: 120 mm (motor to motor)
Weight: 60 gram (including battery)
Operating Time: 30 mins (on ground) 5 mins (in flight)
Sensors: two cameras, a microphone, IMUs, range sensor, battery monitor
Operating Voltage: 11.8v
Payload: 25 gram
OS: Linux Ubuntu
Connection to Host: Bluetooth
HISTORY
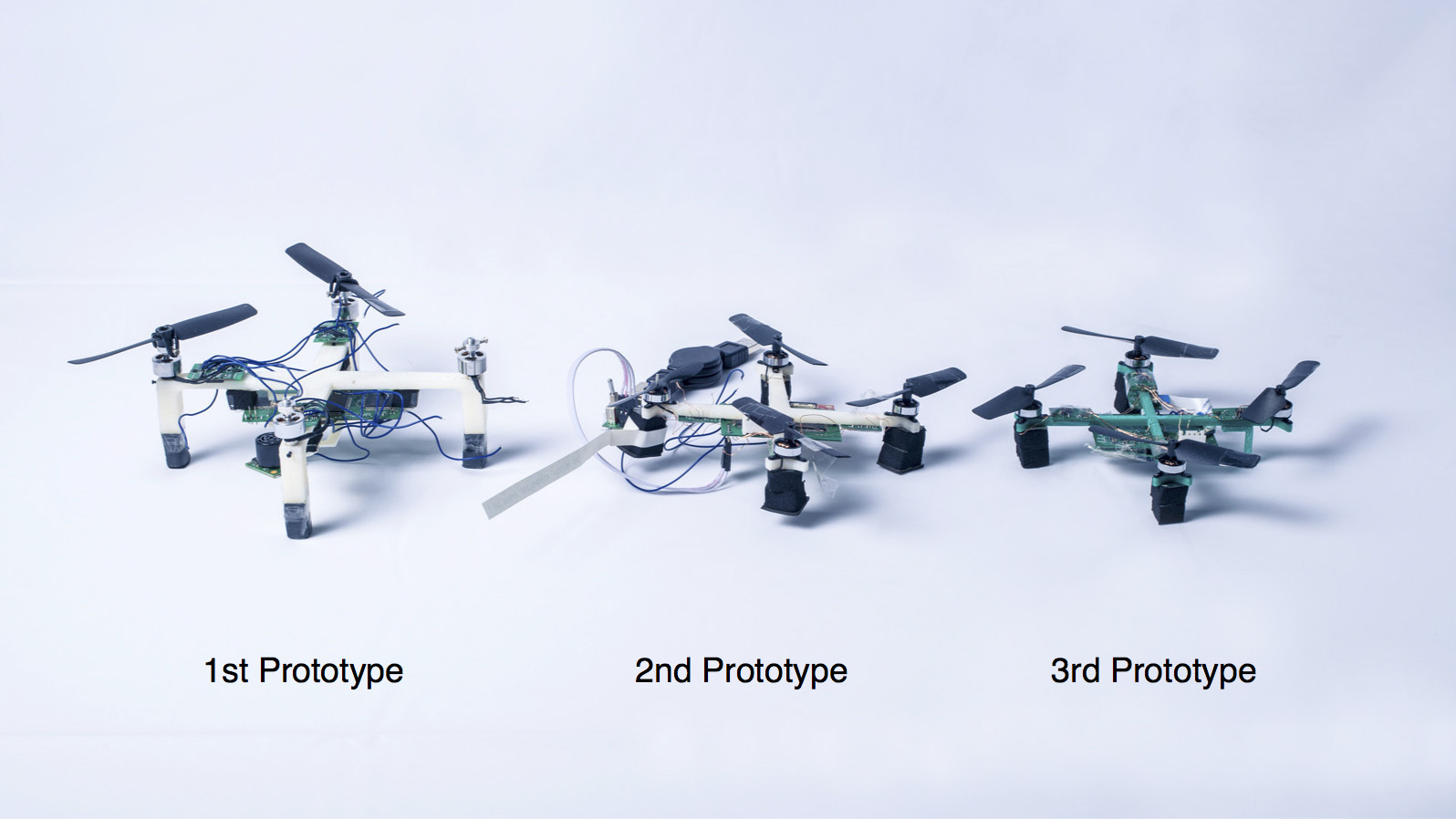
Phenox project was started in 2012. Through experiments and prototyping Phenox has come to the 4th version.
1st Prototype: Success in flight at the end of 2012. Micro-controller (cortex-M4) , FPGA(Spatran-6) and DDRSDRAM(64MB), IMUs, a monocular camera and 4-inch propeller. 120g.
2nd Prototype: Self-position estimation system using a monocular camera. Very small brushless motor and its control system. 100 grams.
3rd Prototype: ZYNQ-7000 Soc and DDR3 on the compact designed circuit board. Boot linux program from 4GB micro SD card and two cameras are used for self position estimation and acquisition of raw images on-board. But two battery are used for noise canceling. 80grams.

4th (current) prototype: Desgined for further improvement of the third prototype. Cables and separated circuit board are united to one main circuit board system. Also, miscellaneous hardware and software bugs are fixed. A battery for logic supply is removed and combined all supply source from one 3-cell battery. Down to 65grams.
TUTORIALS
Tutorial 1: Reading Images from Two Cameras
Tutorial 6: Autonomous Flight and Flight Log
PUBLICATION
Kensho Miyoshi, Ryo Konomura and Koichi Hori, “Entertainment Multi-Rotor Robot that realises Direct and Multimodal Interaction”, The 28th British HCI Conference, Sep 9 – 12, 2014 (to appear)
Kensho Miyoshi, Ryo Konomura and Koichi Hori, “Above Your Hand: direct and natural interaction with aerial robot”, SIGGRAPH 2014, Emerging Technologies, Aug 10 – 14, 2014 (to appear)
Ryo Konomura and Koichi Hori,”Visual 3D Self Localization with 8 Gram Circuit Board for Very Compact and Fully Autonomous Unmanned Aerial Vehicles”, 2014 IEEE International Conference on Robotics and Automation, May 31 – June 5, 2014
Ryo Konomura, Koichi Hori, ”Designing Hardware and Software Systems Toward Very Compact and Fully Autonomous Quadrotors”, IEEE/ASME International Conference on Advanced Intelligent Mechatronics, July, 2013.
IMPORTANT
1. To achieve maneuverability, Phenox is designed to reduce weight – at the same time, fragile. So control it with care in each operating cycle.
2. Please read online manual carefully and see our tutorials before playing with Phenox.
3. As propellers are naked, please ensure safety with eye protectors anytime.
4. Phenox is an experimental device for developers and radio operators. As Bluetooth connector receives no qualification, please make experiments carefully about environment.