ENGLISH
ENGLISH








説明
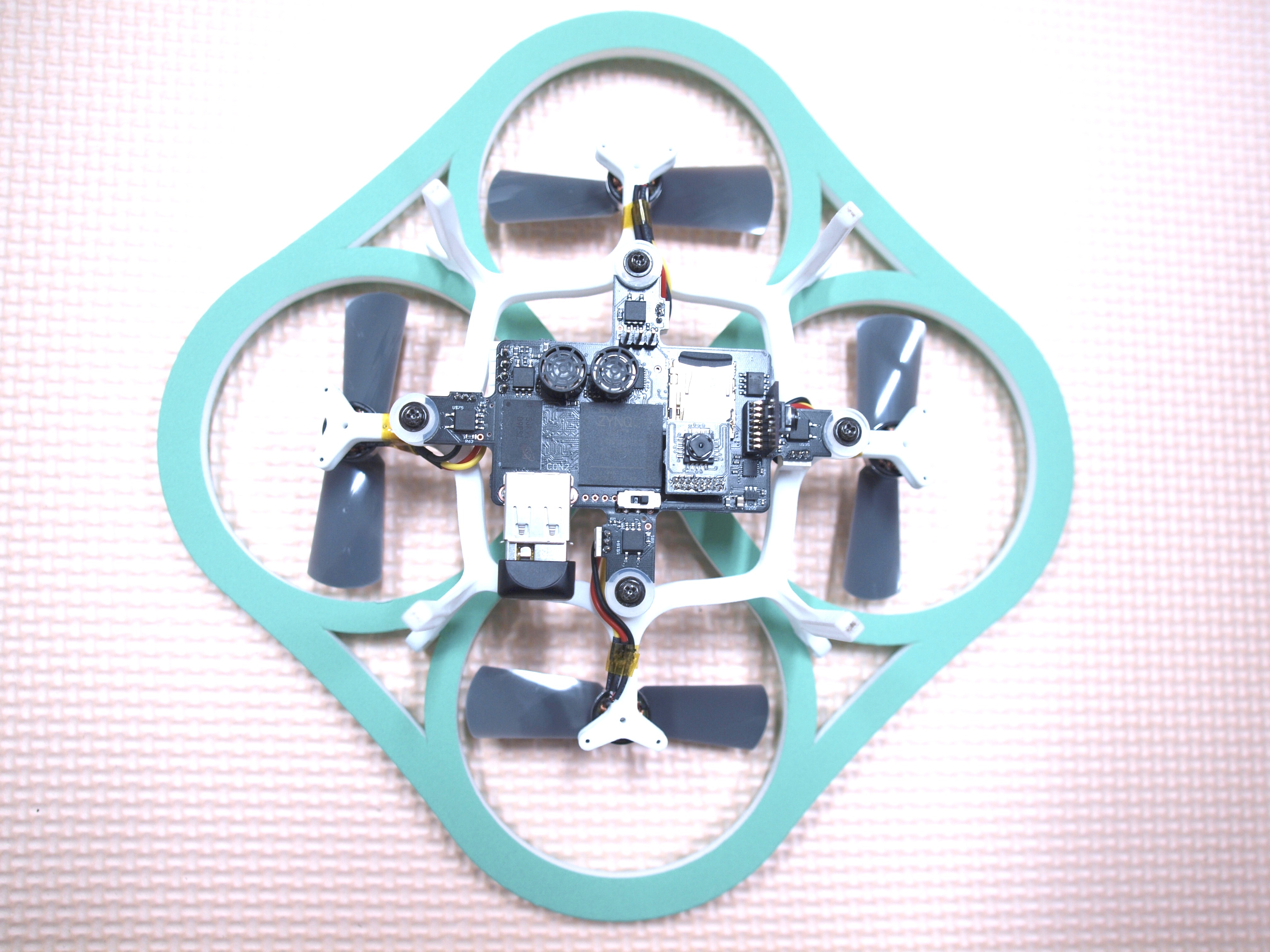
Phenox2は非常にコンパクトなドローンであるだけではなく、汎用的なモバイ ルロボットのSLAM(環境と自己位置推定の同時推定)の実現に必要なセンサ類とコンピュータを備えています。FPGAを用いた高速画像処理により、リアルタイムな自己位置推定と、画像処理への応用が可能です。
さらに、オンボード上に構築されたLinux (Ubuntu13.04)を使って、ユーザーはプログラムを自由に書き換えることが可能です。Phenox2より新しく実装されたWiFiモジュールを用いることで、好みのLinuxパッケージをインストールすることができる他、OpenCVやNode.jsなどのオープンソースソフトウェアと組み合わせることにより、「自律飛行可能な小型コンピュータ」としての応用も可能です。
また、Phenox2はPhenoxに比べ、非常に頑丈な設計になっており、独自のプロペラの設計により、非常に静音性に優れた機構となっております。

諸元
総重量: 75グラム (バッテリ込み)
ペイロード: 20グラム
持続時間: 5分(航続時間), 20分(無飛行状態)
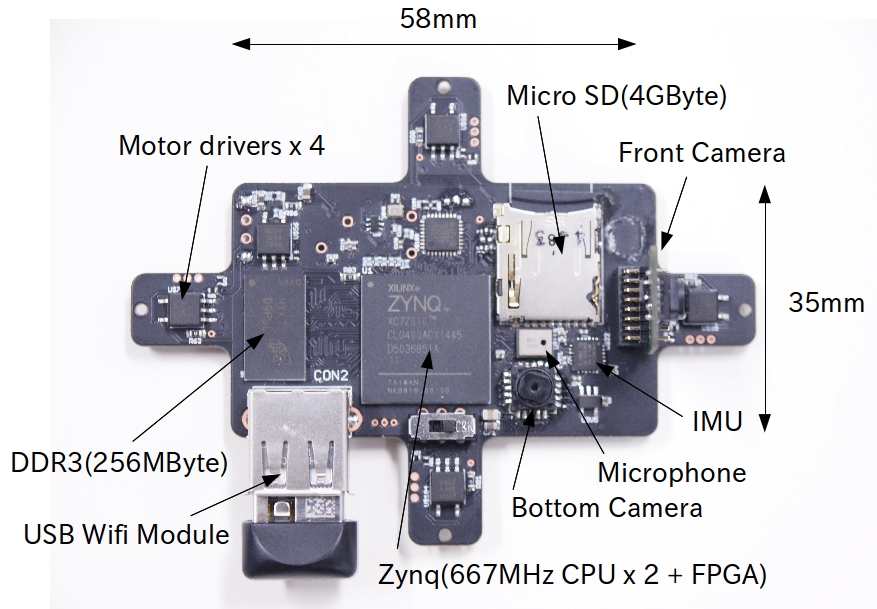
計算機: Xilinx Zynq XC7Z010(Cortex-A9 processer 667MHz x 2, FPGA)
メモリ: DDR3メモリ(256MB), マイクロSDカード(4GB)
周辺部品: CMOS camera(正面、下面の2個), マイク, IMU(加速度センサ、ジャイロセンサ、コンパスセンサ), 超音波距離計、ブザー
通信: 2.4GHz WiFi module
開発言語: C or C++